Ship to:
France
Select the desired shipping method
- Shipping Company Estimated Delivery Time Shipping Cost



עיקרי הדברים
- קל לשימוש
- הגדל את מעגל המסנן, יציאת יציאת האות
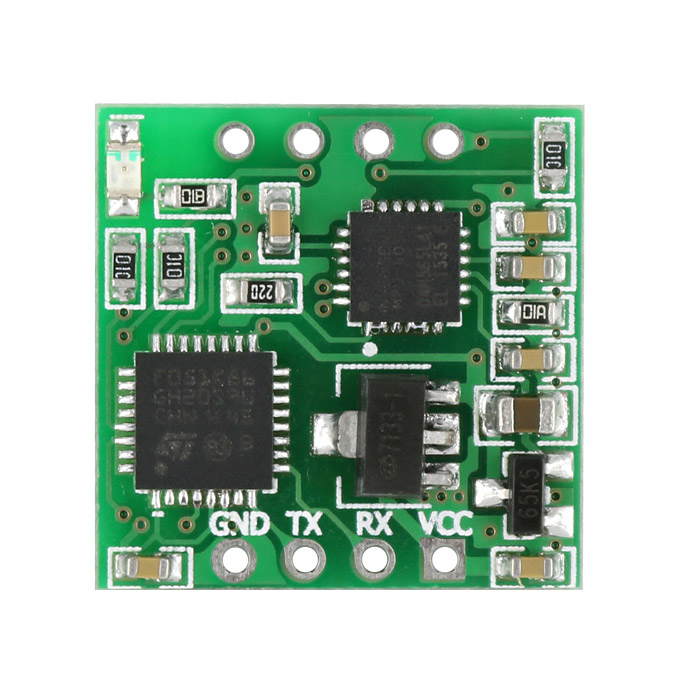
- המודול משתמש גבוהה gyroscopes דיוק / accelerometers MPU6050 ו חזק מעבד STM32. STM32 קורא את נתוני המדידה מ MPU6050, ולאחר מכן פלט אותו דרך יציאת UART טורית כדי למנוע מהמשתמש לכתוב הליכים מורכבים עבור MPU6050.
- המודול מאמצת טכניקות סינון דיגיטליות מתקדמות (מסנן קלמן) אשר יכולות להפחית ביעילות את רעש המדידה ולשפר את דיוק המדידה. זה משלב מנוע תנועה DMP, אשר מקבל quaternion לקבל גישה הנוכחית. דיוק מדידת הגישה הוא 0.01 תואר ויציבות גבוהה.
מִפרָט
| כללי | |
|---|---|
| סוּג | מודול גירוסקופ |
|
ממשק נתונים |
סידורי (רמת TTL), I2C (מחובר ישירות MPU6050, אין פלט עמדה) |
| קצב שידור | 115200bps או 9600bps |
| פורמט תקשורת טורית | 8N1 |
| מתח הפעלה | 3.3V - 6VDC (על הלוח 3.3V הרגולטור) |
|
הפעלה הנוכחית |
10mA (לכל היותר) |
| מתח לוגי | רמה גבוהה היא 3.3V, רמה נמוכה היא 0-0.3V |
| פין פיץ ' | 2.54mm |
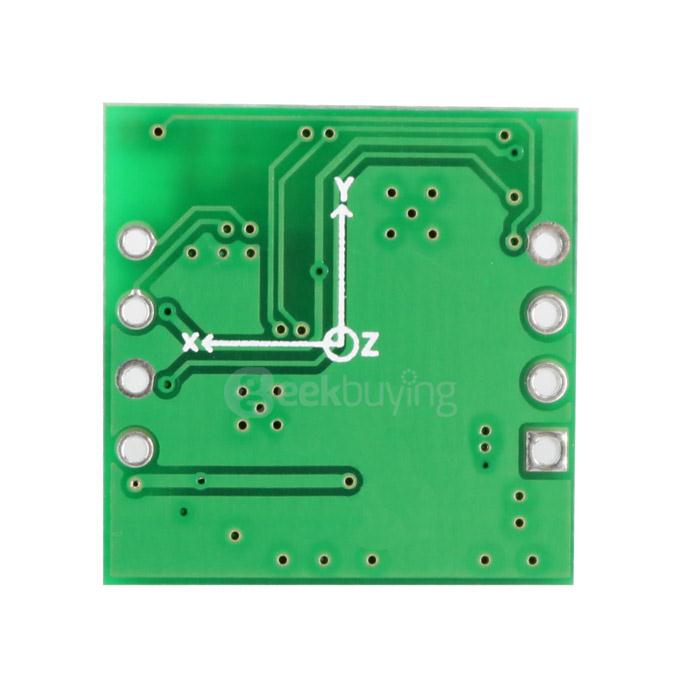
| מדידה | מידות מדידה: האצה: 3D, מהירות זוויתית: 3D, זווית גישה: 3D טווח: תאוצה: ± 16 גרם, מהירות זוויתית: ± 2000 ° / s רזולוציה: תאוצה: 6.1e-5g, מהירות זוויתית: 7.6e-3 ° / s יציבות: תאוצה: 0.01 גרם, מהירות זוויתית: 0.05 ° / s |
| תכולת חבילה | |
| 1 x סידורי 6 ציר ציר מודול חיישן | |


תמונות של לקוחות
סרטוני לקוחות
חוות דעת של לקוחות
| כוכב 5 | 0 | |
| כוכב 4 | 0 | |
| כוכב 3 | 0 | |
| כוכב 2 | 0 | |
| כוכב 1 | 0 |
כתוב ביקורת
- את כל (0)
- החדשה0)
- סרטונים (0)